

基本概念
概述
行为树(Behavior Tree, BT)是一种用于构建自主代理(例如机器人或电脑游戏中非玩家控制的角色)决策过程的形式化图形建模语言。与有限状态机不同,行为树是控制“任务”执行流程的分层节点树。
它的主要特点和用途包括:
- 图形化建模:行为树使用图形符号来表示不同的任务和决策流程,使得复杂的逻辑易于理解和维护。
- 分层结构:行为树采用分层设计,可以将复杂的决策过程分解成多个层级,每个层级处理特定的任务或决策。
- 灵活性和可扩展性:通过组合不同的节点,可以轻松地修改或扩展行为树,以适应新的需求或环境变化。
- 广泛的应用领域:最初应用于视频游戏中的NPC控制,现在也被广泛应用于机器人技术、自动化系统等领域。
基本组成
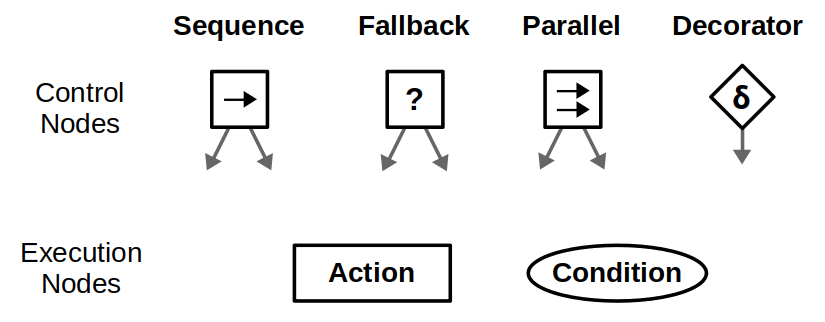
下图展现了一个基本的行为树结构:
行为树由节点(Node)构成,节点主要有两种类型:控制结点(Control node)和执行节点(Execution node)。其中,控制节点又分为四种,分别为顺序节点(Sequence),选择节点(Fallback or Selector),并行节点(Parallel)和装饰节点(Decorator);执行节点分为两种,分别为条件节点(Condition)和动作节点(Action)。

控制节点
控制节点(Control node)是行为树的内部结点,它们定义了遍历其子结点的方式。控制结点的子节点可以是执行结点,也可以是控制结点。顺序(Sequence),选择(Fallback),并行(Parallel)这3种类型的控制结点可以有任意数量的子结点(1-N),而装饰(Decorator)结点只能有一个子结点,表示对子结点的行为进行修饰。
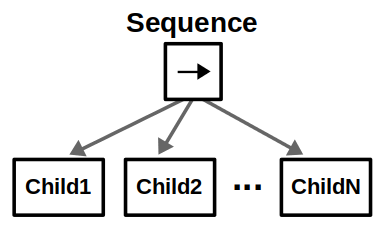
- 顺序节点(Sequence):按照顺序依次执行其子结点,直到某个子结点返回失败或成功,或者所有子结点都返回成功。
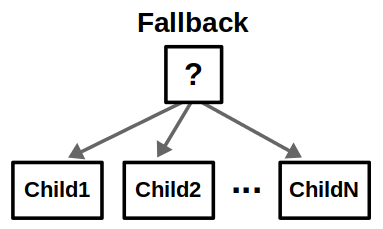
- 选择节点(Fallback or Selector):按照顺序依次执行其子结点,直到某个子结点返回成功,或者所有子结点都返回失败。
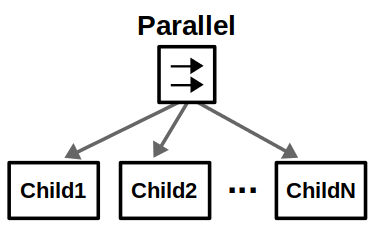
- 并行节点(Parallel):并行节点将“并行”执行其所有子节点。 之所以打上引号,是因为这不是真正的并行;在每次每个子节点都会按顺序单独进行。 当至少有M个子节点(在1到N之间)执行成功时,并行节点会返回成功;当所有子节点都执行失败时,并行节点会返回失败。
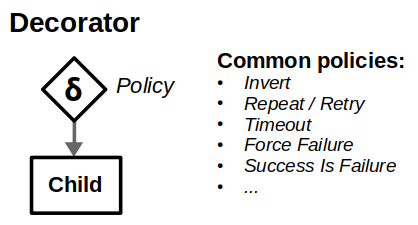
- 修饰节点(Decorator):装饰节点用自定义策略修改单个子节点。 装饰器有自己的一套规则来改变“被装饰节点”的状态。 例如,“反转 “装饰器会将 “成功 “改为 “失败”,反之亦然。常见的修饰有:反转(Invert),重复(Repeat/Retry)等。
执行节点
执行节点(execution node):行为树的叶子节点,可以是动作节点(Action)或条件节点(Condition)。
- 动作节点(Action:执行一个动作,例如,向一个目标移动、攻击、使用物品等。
- 条件节点(Condition):检查一个条件,例如,玩家是否在攻击范围内、是否已到达目标位置等。
| 节点类型 | 子节点数量 | 描述 |
|---|---|---|
| 顺序节点(Sequence) | 1-N | 按照顺序依次执行其子结点,全部成功或者遇到失败 |
| 选择节点(Fallback) | 1-N | 按照顺序依次执行其子结点,全部失败或者遇到成功 |
| 并行节点(Parallel) | 1-N | 并行执行其所有子节点,至少M个成功,或者执行失败 |
| 修饰节点(Decorator) | 1 | 修饰单个子节点 |
| 动作节点(Action) | 0 | 执行一个动作 |
| 条件节点(Condition) | 0 | 检查一个条件 |
执行流程

行为树按照设定的频率(一般为100-200HZ)离散地更新步骤,信号(这里称之为”tick”)在树的根节点开始被执行,然后它通过分支进行传播直到它到达一个或者多个叶子。这里的tick意味着去唤醒一个树节点的回调函数tick()。当节点被tick后,会向其父节点返回状态,如下所示:
- 成功(Success):节点执行成功;
- 失败(Failure):节点执行失败;
- 运行中(Running):节点正在执行。
注意条件节点(Condition)只能返回成功或失败,不能返回运行中。
示例
假设现在有一个机器人需要去搜索一个物品。
若物品只在一个区域A存在,则我们可以使用一个简单的顺序节点(Sequence)来控制机器人的搜索过程,结构如下:
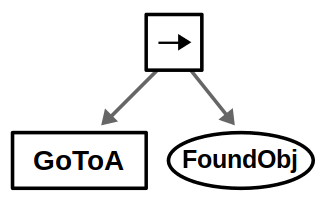
如上图,我们用动作节点(Action)执行到A区域的行为,然后通过条件节点判断是否找到物品。
在前往A区域时,动作节点返回运行中(Running);当到达A区域时,返回成功(Success);否则返回失败(Failure),整个顺序节点结束。
当到达A区域时,条件节点检查物品是否在A区域内,若找到则返回成功,否则返回失败。
当条件节点返回成功时,表示整个顺序节点成功执行,整个顺序节点结束,返回成功,机器人搜索结束;否则返回失败。
如果物体不只是存在区域A,而是可能在其他的区域(1-N),这样我们可以加入一个判断循环条件,每次先判断是否在区域M,如果不在,就前往区域M,然后执行搜索,结构框图如下:
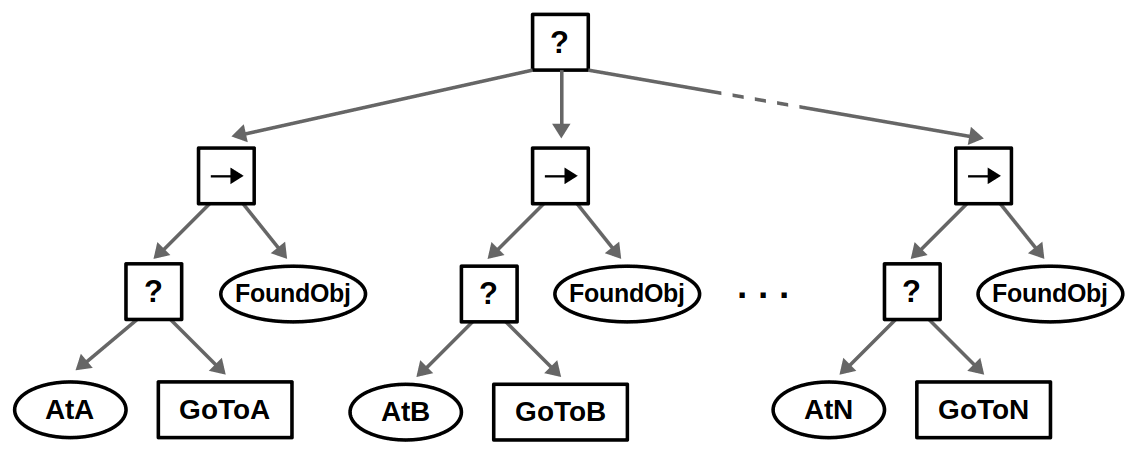
在上图,引入了显式成功条件(explicit success condition),即在执行动作前总是先进行条件检测。比如,先检测机器人是否已经在A处,如果在就不执行去A处的动作,直接返回成功状态。一般使用选择节点(Fallback)和条件节点(Condition)构成。
修饰节点(Decorator)和黑板(Blackboard)
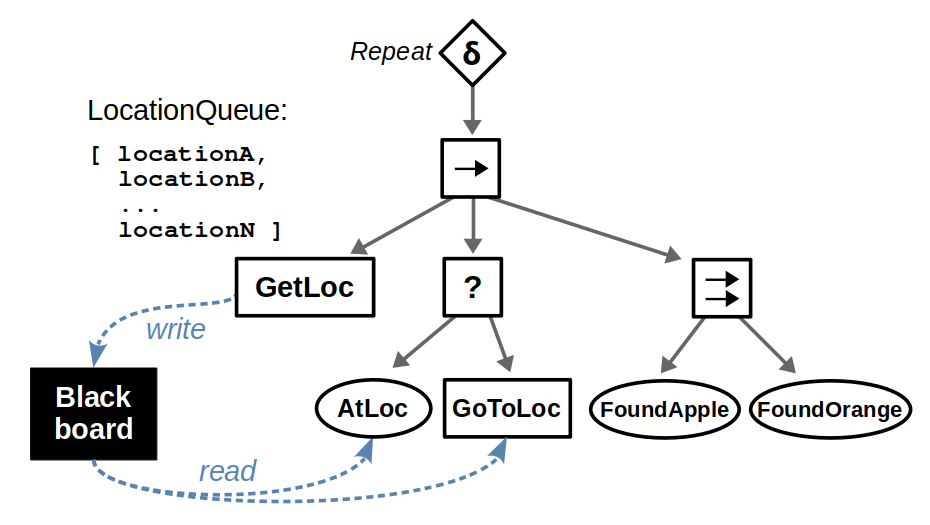
考虑上面的行为树,我们可以发现,如果区域很多并且会动态修改,这样每次更新行为树时,都需要修改节点,非常麻烦。为了解决这个问题,我们可以使用黑板(Blackboard)来存储动态数据,并通过修饰节点(Decorator)来修改行为树。
- 黑板(Blackboard):行为树中存储动态数据的结构,实际上只是一个公共存储区域,各个行为可以在其中读取或写入数据;
- 装饰节点(Decorator):相较于每增加一个地点就复制一份相同的子树,我们可以使用一个特点的规则(如重复(Repeat))的修饰节点,描述这个节点的运行逻辑。
针对上面存在的问题,我们可以给行为树添加一个Repeat装饰节点和一个GetLoc的动作节点,用来在每一次迭代读取新的搜寻地址。GetLoc操作从已知位置队列中弹出一个位置,并将其作为某个参数target_location写入黑板。如果队列为空,则返回Failure;否则返回Success。然后,处理导航的下游节点可以使用此 target_location参数,该参数在每次子树重复时都会更改。如下图所示:
BehaviorTree.CPP
参考文档:BehaviorTree Docs
BehaviorTree.CPP是一个开源的C++库,用于构建行为树。本文的行为树版本为3.8.7。
xml脚本储存树结构
行为树通过xml脚本构建,xml脚本的语法分为compact和explicit两种,前者结构简单,后者包含消息更多,方便软件读取。xml脚本的格式如下:
<root main_tree_to_execute = "MainTree">
<BehaviorTree ID="MainTree">
<Sequence name="root_sequence">
<Action ID="SaySomething" name="action_hello" message="Hello"/>
<Action ID="OpenGripper" name="open_gripper"/>
<Action ID="ApproachObject" name="approach_object"/>
<Action ID="CloseGripper" name="close_gripper"/>
</Sequence>
</BehaviorTree>
</root>
<BehaviorTree>,<Action/>,<Sequence/>等表示了这个节点的类型;ID描述了节点的类型,这些类型为之前在程序里面注册过的,name表示节点的名字,这个名字是必须的,并且不能重复;messaage用于在不同节点之间传递的消息,对因为黑板里面的数据
为了方便使用Groot软件编写,这里采用explicit语法。
子树
我们可以将一些节点组合成一个子树,子树可以嵌套,子树也可以作为节点参数传入,以此来降低行为树的复杂度。
<root main_tree_to_execute = "MainTree" >
<BehaviorTree ID="MainTree">
<Sequence>
<Action ID="SaySomething" message="Hello World"/>
<SubTree ID="GraspObject"/>
</Sequence>
</BehaviorTree>
<BehaviorTree ID="GraspObject">
<Sequence>
<Action ID="OpenGripper"/>
<Action ID="ApproachObject"/>
<Action ID="CloseGripper"/>
</Sequence>
</BehaviorTree>
</root>
外部文件
在一个xm文件里面。可以使用其他文件的树结构,使用标签如下:
<include path="path_to_another_xml"/>
将前面两个树结构拆分两个文件,如下所示:
<!-- file maintree.xml -->
<root main_tree_to_execute = "MainTree" >
<include path="grasp.xml"/>
<BehaviorTree ID="MainTree">
<Sequence>
<Action ID="SaySomething" message="Hello World"/>
<SubTree ID="GraspObject"/>
</Sequence>
</BehaviorTree>
</root>
<!-- file grasp.xml -->
<root BTCPP_format="4" >
<BehaviorTree ID="GraspObject">
<Sequence>
<Action ID="OpenGripper"/>
<Action ID="ApproachObject"/>
<Action ID="CloseGripper"/>
</Sequence>
</BehaviorTree>
</root>
注意如果你想在 ROS 包中查找文件,您可以使用以下语法:
<include ros_pkg="name_package" path="path_to_file"/>
在CPP里面使用
cmake里面需要添加:
find_package(behaviortree_cpp_v3 REQUIRED)
target_link_libraries(executable_name BT::behaviortree_cpp_v3)
在CPP里面使用:
#include "behaviortree_cpp_v3/bt_factory.h"
using namespace BT; // optional
库处于命名空间BT里面,为了避免污染命名空间,建议不要直接使用using namespace BT;。
节点状态
在BehaviorTree.CPP中,节点的状态通过enum class NodeStatus来表示,在头文件<behaviortree_cpp_v3/basic_types.h>中定义,官方实现如下:
/// Enumerates the possible types of nodes
enum class NodeStatus
{
IDLE = 0,
RUNNING = 1,
SUCCESS = 2,
FAILURE = 3,
SKIPPED = 4,
};
我们可以通过自定义函数来实现状态的返回,如下所示:
BT::NodeStatus CheckBattery()
{
std::cout << "[ Battery: OK ]" << std::endl;
return BT::NodeStatus::SUCCESS;
}
节点类型
在BehaviorTree.CPP中,节点的对应关系如下:
| 节点类型 | CPP 类名 |
|---|---|
| 动作节点(Action) | BT::SyncActionNode |
| 条件节点(Condition) | BT::ConditionNode |
| 控制节点(Control) | BT::ControlNode |
| 修饰节点(Decorator) | BT::DecoratorNode |
分别在头文件<behaviortree_cpp_v3/action_node.h>、<behaviortree_cpp_v3/condition_node.h>等定义。在CPP程序里面,我们需要通过继承来实现不同的动作节点和条件节点;控制节点和修饰节点通过xml文件来配置。
之后将会具体介绍如何实现自定义节点。
如下简单展示了一个动作节点的实现:
// Example of custom SyncActionNode (synchronous action)
// without ports.
class ApproachObject : public BT::SyncActionNode
{
public:
ApproachObject(const std::string& name) :
SyncActionNode(name, {})
{}
// You must override the virtual function tick()
BT::NodeStatus tick() override
{
std::cout << "ApproachObject: " << this->name() << std::endl;
return BT::NodeStatus::SUCCESS;
}
};
环境安装
下载BehaviorTree.CPP,版本为3.8。 下载Groot。
安装BehaviorTree.CPP
先将下载的BehaviorTree.CPP解压,进入目录然后执行以下命令:
mkdir Build
cd Build
cmake ..
make
sudo make install
安装Groot
安装依赖
sudo apt install qtbase5-dev libqt5svg5-dev libzmq3-dev libdw-dev
下载Groot,解压,进入目录,并运行。
git clone --recurse-submodules https://github.com/BehaviorTree/Groot.git
cd Groot
cmake -S . -B build
cmake --build build
问题
在编译Groot的时候,出现以下错误:
/usr/bin/ld: 找不到 -lncurses: 没有那个文件或目录 /usr/bin/ld: 找不到 -lncursesw: 没有那个文件或目录 /usr/bin/ld: 找不到 -ltinfo: 没有那个文件或目录从新安装ncurses-dev即可。
sudo apt update sudo apt install libncurses-dev遇到奇奇怪怪的问题,可以先把build清理掉,从新再试一次。
参考文章
[1] BehaviorTree.CPP
[2] Introduction to behavior trees
[3] Behavior Trees in Robotics and AI: An Introduction [4] Groot行为树UI编辑器安装教程